Tin Chiang


Background
Haptic feedback presents a significant challenge for endoscopic surgical robots due to sterilization requirements and the complexities of cable-driven designs. The high temperatures required for sterilization complicate the integration of force sensors onto the grasper, while the cable-driven structure introduces considerable uncertainties in modeling the robot's dynamics and kinematics. Nonetheless, providing force feedback is highly advantageous for both surgeons and patients.
Brief Intro
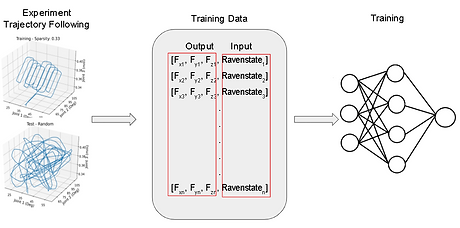
The project seeks to establish a calibration process to enable contact force estimation on the Raven-II surgical robot without using direct sensors. We gather robot state data while simulating contact forces on the robot's grasper with a novel cable-driven device. This data is then used to train a neural network to infer the inverse dynamics relationship encoded in the robot's state information.
Contribution
-
Designed and constructed the "Force Unit," which regulates cable tension using a DC motor.
-
Developed a feedback controller for the Force Unit to maintain cable tension during passive motor motion.
-
Created a force sensor system capable of functioning in a noisy environment.
-
Integrated the feedback controller, sensor module, and high-level controller using ROS for streamlined operation.
Skills
-
CAD(Creo)
-
3D Printing
-
PCB Design(Flux, KiCAD)
-
ROS
-
DC Motor Control
-
Feedback Control
-
Digital Signal Processing
Raven-II Surgical Robot Platform
The Raven-II Surgical Robot Platform is an open-architecture system designed for laparoscopic surgery research. Developed by the University of Washington in 2010, it continues to serve as a global testbed for advancements in minimally invasive surgical technology.


Challenges in Cable-Driven Design
The Raven's actuators are located at the base of the robot arm, with each actuator controlling a joint via a pair of cables that run through the arm. This design eliminates the need for electronics on the arm itself, making the structure compact and sterilizable.
However, the cable-driven design introduces significant uncertainty in the robot's control:
-
The elasticity of the cables and mechanical backlash reduce position control accuracy.
-
Friction between the cables and pulleys, as well as coupling between joints, complicates torque estimation for each joint.
-
As the operating time increases, the cables will stretch and change in tension.
Such characteristics not only complicate the physics-based modeling but also make it difficult to generalize the model of different robots, as the individual robot condition will largely affect the model performance.
The Learning-Based Approach
A learning-based, data-efficient modeling approach is desired in this scenario, as it can characterize an individual robot before usage by running a carefully designed calibration process.
This calibration process will involve collecting robot information while applying a known contact force on the surgical tool.

Simulating the Contact Forces
To enable a data-efficient calibration process, the quality and coverage of the training data are paramount. The model should be able to "see" as many scenarios as possible. That is, the data should be collected while the robot is subjected to diverse contact forces( magnitude, direction) under various configurations ( position, velocity, etc.)
The proposed method is to simulate contact forces with multiple cables connected to the robot grasper. By changing the tension of different cables, we can control the direction and magnitude of the net force.
The "Force Unit"
The cable tension is controlled by a device that we refer to as a "force unit". A force unit is essentially a DC motor with a load cell. The DC motor applies tension to a cable, and the tension is measured by the load cell.


Process of Simulating a Contact Force
A series of controllers are developed on ROS to simulate the contact force. A predefined contact force profile will be sent to a high-level controller, which calculates the required tension on each cable based on the grasper location.
Then, the tension commands will be sent to a low-level feedback controller, which measures the cable tension with the load cell and adjusts the current that passes through the motor.

Low-Level Feedback Control: Why do we need it?
One might argue that a low-level torque controller is unnecessary due to the linear relationship between stall torque and current in a DC motor. However, the motor in the force unit must passively follow the surgical robot's movements, causing it to frequently switch between stalling, braking, and driving states. In our application, the torque operates within a range where internal friction is still dominant.
As illustrated on the left, the internal friction exhibits a highly non-linear relationship with motor velocity, making it challenging to compensate without direct measurement.
This is an ongoing research project.
More content will be updated if we think it's appropriate. Please contact me if you would like to know more details.